
GVF Alogorithm Briefing
Global Vegetation Fraction (GVF) is calculated from NOAA/NESDIS the second generation Global Vegetation Index (GVI2) data set.NDVI calculation
NDVI is calculated from weekly composite reflectance of AVHRR visible channel 1 and 2 which is available in GVI2 data set. Post-launch calibration is applied for each satellite. The calibration parameters vary from week to week in order to account for the variation of satellite degradation. The calibration equation also varies with satellites. Reflectance = f ( ch_count, calibration_parameters)
NDVI= (R2 -R1)/(R2+R1)
where, R1,R2 is the reflectance of CH1 and CH2
Smooth the NDVI
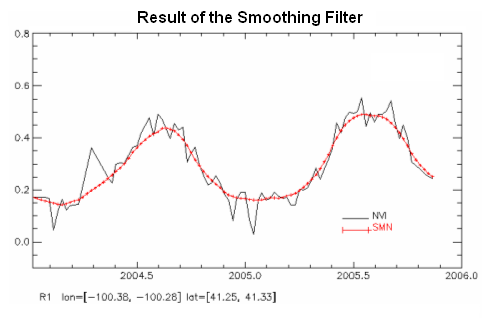
Although GVI2 dataset is 7 days maximum NDVI composite dataset, there are still some cloud pixels remaining in the GVI2 dataset. In order to reduce the effect of cloud contamination, a temporal filter is applied on NDVI. Previous research result shows the selected digital filter is a low-frequency pass filter, it is good at removing random noise like cloud. For a particular week in the time series, it is mostly affected by 15 weeks' data around it.
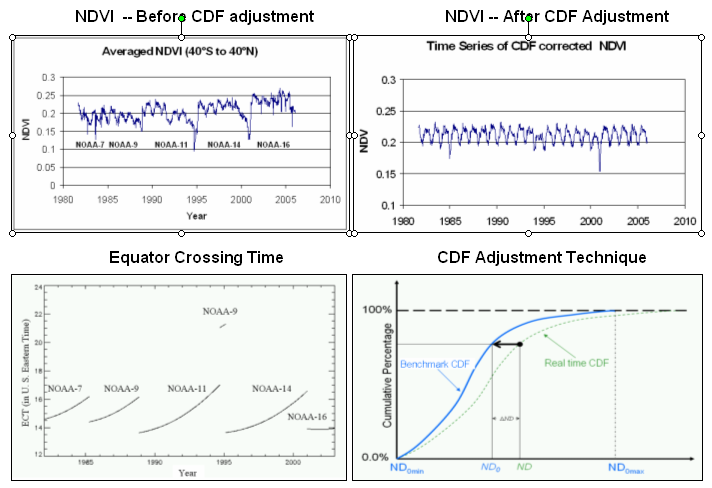
Smoothed NDVI is further adjusted by ACDF technique to minimize the discrepancies due to orbiting drifting, sensor degradation, atmospheric contamination, AVHRR sensor response function differences among various satellites, etc.
Scale CDF adjusted Smoothed NDVI to GVF
GVF is linear scaled from CDF adjusted smoothed NDVI.
GVF= (SMN-0.05)/0.44 *100
Limitation
- NDVI and GVF products are to be interpreted as Top-Of-Atmosphere (TOA) quantities. No atmospheric or radiative transfer corrections were applied to derive the final products to represent the Top-Of-Canopy (TOC).
- Algorithms and modules to remove noise and adjust for anomalous trends are mathematically and statistically based. No explicit physics-based correction modules were applied.
- End of smoothing filter problem: The use of the 15-point smoothing filter in time series (at pixel level) caused unstable data value for the last 7 weeks. In real time production, "Initial Early Product" of NDVI or GVF, which is at the end of the smoothing filter, is expected to be relatively noisy because the smoothing filter had little impact to correct the data value at the end point of the time series; while "Final Update Product" of NDVI or GVF is expected to be more reliable because it takes the full advantage of the smoothing filter. However, the "Final Update Product" has 7 weeks latency in real time.
- Unless users have to use the "Initial Early Product" in real time operations, we advise to use the "Final Update Product" for research, hindcast, and/or other simulation purposes.